Mar 24, 2019
Last updated November 2020.
The University of California Berkeley Artificial Intelligence Research (BAIR)
Lab is pleased to announce the BAIR Open Research Commons, a new industrial
affiliate program launched to accelerate cutting-edge AI research. AI research
is advancing rapidly in both university and corporate research settings, with
existing collaborations already underway driven by individual
researcher-to-researcher collaborations. The BAIR Commons is designed to enhance
and streamline such collaborative cutting-edge research by students, faculty,
and corporate research scholars.
The Commons agreement has been framed with the goal of promoting open research
in AI: all on-campus effort, data, and results in the Commons program will be
non-exclusive with open publication and open-source code release expected.
Fostering an environment for excellence for graduate student research is the
primary motivation of the new program: Berkeley students will lead the design of
projects in the Commons, and the program of research must be approved by their
home departments before a project commences. Students are expected to benefit
from collaboration with leading researchers in industrial research labs, as well
as the availability of partner resources useful to investigate certain open
questions in state-of-the-art AI research. The University will benefit from
membership fees paid by partners to participate in the program. The Commons
agreement provides for collaborative joint projects between the partners and
Berkeley, with intellectual property shared jointly and equally by the parties.
The agreement also provides for joint research “lablets”, which will be embedded
collaborative open research spaces inside BAIR’s new 27,000 sq. ft. research
facility in the Berkeley Way West facility on the Berkeley
campus. More than a dozen faculty and 120 students will be assigned space in
the new lab, with an equal number of visiting positions allocated for
researchers from other BAIR labs and for visiting industrial partners.
Alliance participants include Alibaba, Amazon, Facebook, Google, Microsoft, and
Samsung. Funding for over twenty joint projects has been committed in the
initial launch of the program, which will support both BAIR facilities and
research efforts. Over 30 faculty and 200 graduate students and postdocs at
Berkeley are affiliated with BAIR. For more information about BAIR or the
Commons program please contact bair-admin@berkeley.edu.

BAIR occupies the top floor of Berkeley Way West.
Continue
Frederik Ebert and Stephen Tian
Mar 21, 2019
Guiding our fingers while typing, enabling us to nimbly strike a matchstick, and
inserting a key in a keyhole all rely on our sense of touch. It has been
shown that the sense of touch is
very important for dexterous manipulation in humans. Similarly, for many robotic
manipulation tasks, vision alone may not be
sufficient –
often, it may be difficult to resolve subtle details such as the exact position
of an edge, shear forces or surface textures at points of contact, and robotic
arms and fingers can block the line of sight between a camera and its quarry.
Augmenting robots with this crucial sense, however, remains a challenging task.
Our goal is to provide a framework for learning how to perform tactile servoing,
which means precisely relocating an object based on tactile information. To
provide our robot with tactile feedback, we utilize a custom-built tactile
sensor, based on similar principles as the GelSight
sensor developed at MIT. The sensor is
composed of a deformable, elastomer-based gel, backlit by three colored LEDs,
and provides high-resolution RGB images of contact at the gel surface. Compared
to other sensors, this tactile sensor sensor naturally provides geometric
information in the form of rich visual information from which attributes such as
force can be inferred. Previous work using similar sensors has leveraged the
this kind of tactile sensor on tasks such as learning how to
grasp, improving
success rates when grasping a variety of objects.
Continue
Charles Packer$^*$ and Katelyn Gao$^*$
Mar 18, 2019
TL;DR
We present a benchmark for studying generalization in deep reinforcement
learning (RL). Systematic empirical evaluation shows that vanilla deep RL
algorithms generalize better than specialized deep RL algorithms designed
specifically for generalization. In other words, simply training on varied
environments is so far the most effective strategy for generalization. The code
can be found at https://github.com/sunblaze-ucb/rl-generalization and the
full paper is at https://arxiv.org/abs/1810.12282.
Continue
“Scientific research has changed the world. Now it needs to change itself.”
- The Economist, 2013
There has been a growing concern about the validity of scientific findings. A multitude of journals, papers and reports have recognized the ever smaller number of replicable scientific studies. In 2016, one of the giants of scientific publishing, Nature, surveyed about 1,500 researchers across many different disciplines, asking for their stand on the status of reproducibility in their area of research. One of the many takeaways to the worrisome results of this survey is the following: 90% of the respondents agreed that there is a reproducibility crisis, and the overall top answer to boosting reproducibility was “better understanding of statistics”. Indeed, many factors contributing to the explosion of irreproducible research stem from the neglect of the fact that statistics is no longer as static as it was in the first half of the 20th century, when statistical hypothesis testing came into prominence as a theoretically rigorous proposal for making valid discoveries with high confidence.
Continue
It would be great if we could all have household robots do our chores for us.
Chores are tasks that we want done to make our houses cater more to our
preferences; they are a way in which we want our house to be different from
the way it currently is. However, most “different” states are not very
desirable:

Surely our robot wouldn’t be so dumb as to go around breaking stuff when we ask
it to clean our house? Unfortunately, AI systems trained with reinforcement
learning only optimize features specified in the reward function and are
indifferent to anything we might’ve inadvertently left out. Generally, it is
easy to get the reward wrong by forgetting to include preferences for things
that should stay the same, since we are so used to having these preferences
satisfied, and there are so many of them. Consider the room below, and imagine
that we want a robot waiter that serves people at the dining table efficiently.
We might implement this using a reward function that provides 1 reward whenever
the robot serves a dish, and use discounting so that the robot is incentivized
to be efficient. What could go wrong with such a reward function? How would we
need to modify the reward function to take this into account? Take a minute to
think about it.
Continue
We are announcing the release of our state-of-the-art off-policy model-free
reinforcement learning algorithm, soft actor-critic (SAC). This algorithm has
been developed jointly at UC Berkeley and Google, and we have been using
it internally for our robotics experiment. Soft actor-critic is, to our
knowledge, one of the most efficient model-free algorithms available today,
making it especially well-suited for real-world robotic learning. In this post,
we will benchmark SAC against state-of-the-art model-free RL algorithms and
showcase a spectrum of real-world robot examples, ranging from manipulation to
locomotion. We also release our implementation of SAC, which is particularly
designed for real-world robotic systems.
Continue
An earlier version of this post is on the RISELab blog. It is posted here
with the permission of the authors.
We just rolled out general support for multi-agent reinforcement learning in
Ray RLlib 0.6.0. This blog post is a brief tutorial on multi-agent RL and
how we designed for it in RLlib. Our goal is to enable multi-agent RL across a
range of use cases, from leveraging existing single-agent algorithms to training
with custom algorithms at large scale.
Continue
Figure: An artistic representation of single-cell RNA sequencing. The
stars in the sky represent cells in a heterogeneous tissue. The projection of
the stars onto the river reveals relationships among them that are not apparent
by looking directly at the sky. Like the river, our Bayesian model, called scVI,
reveals relationships among cells.
The diversity of gene regulatory states in our body is one of the main reasons
why such an amazing array of biological functions can be encoded in a single
genome. Recent advances in microfluidics and sequencing technologies (such as
inDrops) enabled measurement of gene expression at the single-cell level and has
provided tremendous opportunities to unravel the underlying mechanisms of
relationships between individual genes and specific biological phenomena. These
experiments yield approximate measurements for mRNA counts of the entire
transcriptome (i.e around $d = 20,000$ protein-coding genes) and a large number
of cells $n$, which can vary from tens of thousands to a million cells. The
early computational methods to interpret this data relied on linear model and
empirical Bayes shrinkage approaches due to initially extremely low sample-size.
While current research focuses on providing more accurate models for this gene
expression data, most of the subsequent algorithms either exhibit prohibitive
scalability issues or remain limited to a unique downstream analysis task.
Consequently, common practices in the field still rely on ad-hoc preprocessing
pipelines and specific algorithmic procedures, which limits the capabilities of
capturing the underlying data generating process.
In this post, we propose to build up on the increased sample-size and recent
developments in Bayesian approximate inference to improve modeling complexity as
well as algorithmic scalability. Notably, we present our recent work on deep
generative models for single-cell transcriptomics, which addresses all the
mentioned limitations by formalizing biological questions into statistical
queries over a unique graphical model, tailored to single-cell RNA sequencing
(scRNA-seq) datasets. The resulting algorithmic inference procedure, which we
named Single-cell Variational Inference (scVI), is open-source and
scales to over a million cells.
Continue
With very little explicit supervision and feedback, humans are able to learn a
wide range of motor skills by simply interacting with and observing the world
through their senses. While there has been significant progress towards building
machines that can learn complex
skills and learn
based on raw sensory information such as image pixels, acquiring large and
diverse repertoires of general skills remains an open challenge. Our goal is
to build a generalist: a robot that can perform many different tasks, like
arranging objects, picking up toys, and folding towels, and can do so with many
different objects in the real world without re-learning for each object or task.
While these basic motor skills are much simpler and less impressive than mastering Chess or even using a spatula, we think that
being able to achieve such generality with a single model is a fundamental
aspect of intelligence.
The key to acquiring generality is diversity. If you deploy a learning
algorithm in a narrow, closed-world environment, the agent will recover skills
that are successful only in a narrow range of settings. That’s why an algorithm
trained to play Breakout will struggle when anything about the images or the
game changes. Indeed, the success of image classifiers relies on large, diverse
datasets like ImageNet. However, having a robot autonomously learn from large
and diverse datasets is quite challenging. While collecting diverse sensory data
is relatively straightforward, it is simply not practical for a person to
annotate all of the robot’s experiences. It is more scalable to collect
completely unlabeled experiences. Then, given only sensory data, akin to what
humans have, what can you learn? With raw sensory data there is no notion of
progress, reward, or success. Unlike games like Breakout, the real world doesn’t
give us a score or extra lives.
We have developed an algorithm that can learn a general-purpose predictive model
using unlabeled sensory experiences, and then use this single model to perform a
wide range of tasks.
With a single model, our approach can perform a wide range of tasks, including
lifting objects, folding shorts, placing an apple onto a plate, rearranging
objects, and covering a fork with a towel.
In this post, we will describe how this works. We will discuss how we can learn
based on only raw sensory interaction data (i.e. image pixels, without requiring
object detectors or hand-engineered perception components). We will show how we
can use what was learned to accomplish many different user-specified tasks. And,
we will demonstrate how this approach can control a real robot from raw pixels,
performing tasks and interacting with objects that the robot has never seen
before.
Continue
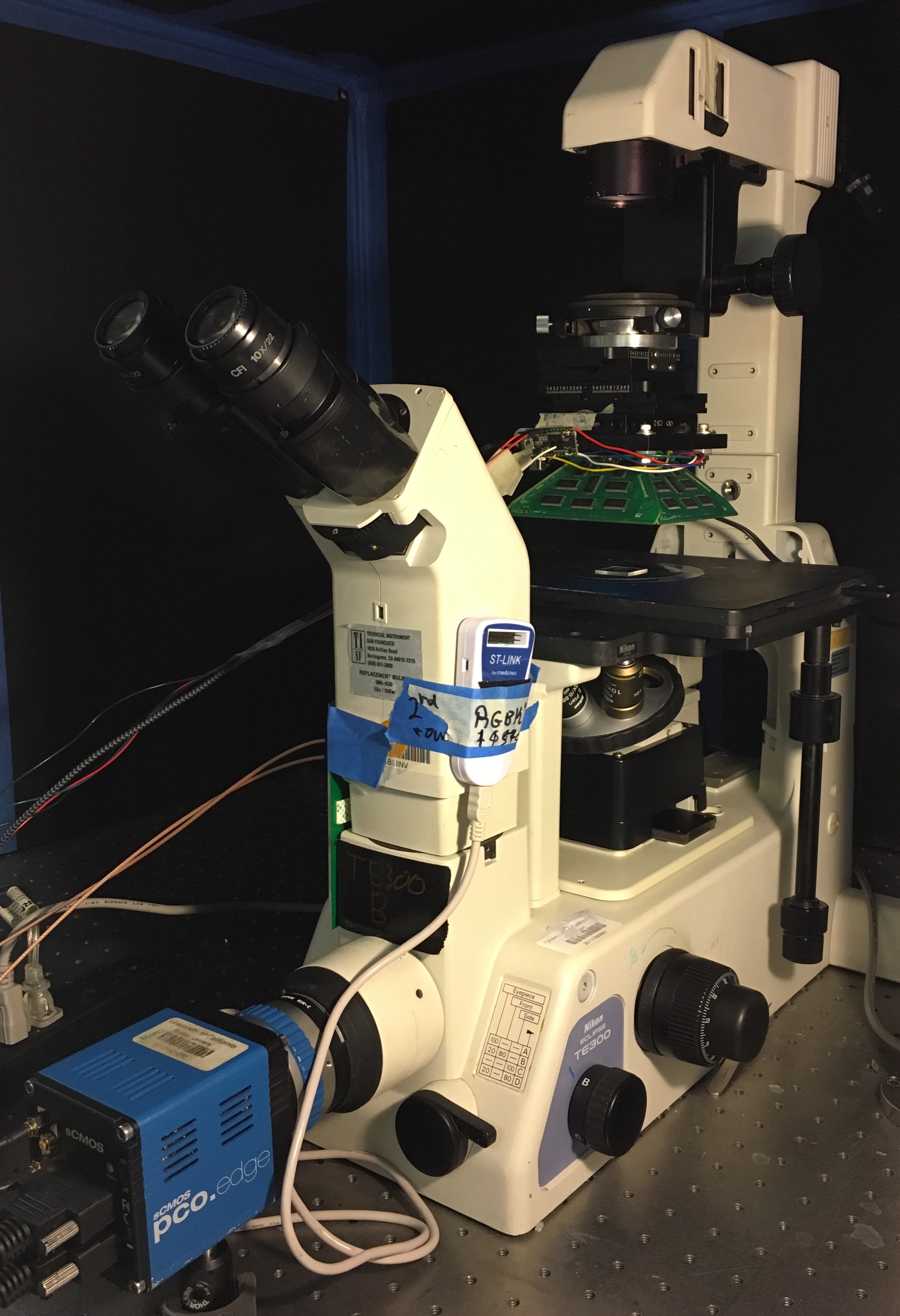
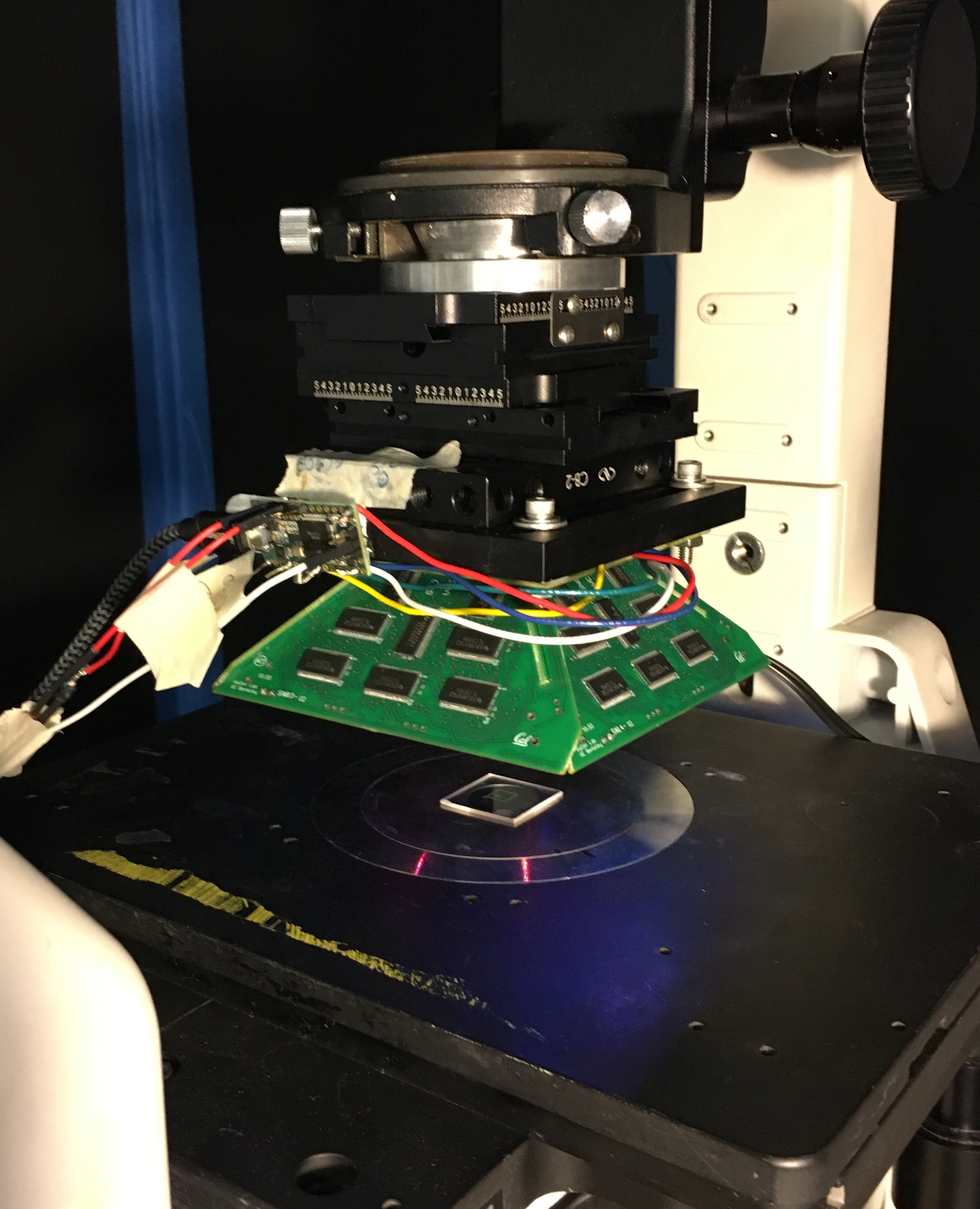

Figure 1: (left) LED Array Microscope constructed using a standard
commercial microscope and an LED array. (middle) Close up on the LED array dome
mounted on the microscope. (right) LED array displaying patterns at 100Hz.
Computational imaging systems marry the design of hardware and image
reconstruction. For example, in optical microscopy, tomographic,
super-resolution, and phase imaging systems can be constructed from
simple hardware modifications to a commercial microscope (Fig. 1) and
computational reconstruction. Traditionally, we require a large number of
measurements to recover the above quantities; however, for live cell imaging
applications, we are limited in the number of measurements we can acquire due
to motion. Naturally, we want to know what are the best measurements to acquire.
In this post, we highlight our latest work that learns the experimental design to maximize the performance of a
non-linear computational imaging system.
Continue